Autonomer Roboter für die Apfelernte
Drehgeber für autonom agierende Erntefahrzeuge auf Obstplantagen
In einem Forschungs- und Entwicklungsprojekt wollen Obstbauer Johann Schröder, die Hochschule 21 aus Buxtehude und der Landmaschinenhersteller PWH einen autonom fahrenden Erntehelfer entwickeln. Drehgeber erfassen dabei den Lenkwinkel des Fahrzeugs sowie die Position der Kistenaufnehmer.
AurOrA (Autonomer Obstplantagenhelfer Altes Land) ist ein kleines autonom fahrendes Fahrzeug, das sich künftig auf Obstplantagen selbstständig bewegen und gefüllte Obstkisten detektieren, aufnehmen und zu einem definierten Entladepunkt bringen soll. Monotone, ermüdende Tätigkeiten sollen durch Technik und Automatisierung mehr und mehr vermieden werden. Die Idee für das Projekt stammt aus der Praxis: Obstbauer Johann Schröder aus Jork im Alten Land südwestlich von Hamburg bat die Hochschule 21 in Buxtehude um Unterstützung bei der Entwicklung eines solchen autonom agierenden Fahrzeugs. Gemeinsam mit dem Landmaschinenhersteller PWH aus Jork wurde das Projekt im Februar 2020 gestartet.
Der Bedarf an technischer Unterstützung ist bei Obstplantagenbesitzern hoch und so soll das Projekt mittelfristig zu einem marktreifen, wirtschaftlichen Produkt werden. Die eigentliche Zielsetzung des Projekts ist jedoch, bis Anfang 2023 einen funktionsfähigen Prototyp zu realisieren, um die technische Machbarkeit zu zeigen. Gefördert wird das Projekt über das ZIM-Förderprogramm des Bundeswirtschaftsministeriums.



Herausforderung: Unterschiedliche Ernteprozesse
Aktuell befindet sich das Projekt im letzten Planungsdrittel, nachdem der zweite Meilenstein erreicht wurde: Der Roboter kann bereits weitgehend autonom in der Plantage agieren. Gearbeitet wird noch an der Kollisionsvermeidung und der Erkennung des Untergrunds, zum Beispiel bei matschigem Boden, um zu vermeiden, dass die Räder durchdrehen und sich das Fahrzeug festfährt oder in einen Graben abdriftet. Meilenstein Nummer drei wird dann die tatsächliche Kistenaufnahme samt Transport sein.
Ein solches Entwicklungsprojekt birgt stets besondere Herausforderungen, angefangen bei der Koordinierung der Interessen zwischen diversen Obstbaubetrieben, die oft sehr unterschiedliche Ernteprozesse haben, über infrastrukturelle Probleme wie einen stabilen Mobilfunkstandard, damit der Roboter GPS-Daten empfangen und auch mit dem Bediener kommunizieren kann, bis hin zu praktischen Schwierigkeiten im täglichen Outdoor-Betrieb (Witterung, Schnee, Regen, Sonneneinstrahlung, Untergrundbeschaffenheit).
Drehgeber für die Lenkwinkel- und Positionserfassung der Kistenaufnehmer
Für ein autonom agierendes Fahrzeug sind Sensoren nötig, die verschiedene Messaufgaben am Fahrzeug übernehmen. Für die Lenkwinkelerfassung sowie die Positionserfassung der Kistenaufnehmer wurde Mess- und Sensorspezialist Siko angefragt. Mit langjähriger Erfahrung bei mobilen Maschinen und in der Landmaschinentechnik konnte das Unternehmen ihre Expertise in die Planungsphase einbringen und schließlich zwei passende Drehgebertypen beisteuern, die diese wichtigen Funktionen unterstützen. Alexander Kammann, wissenschaftlicher Mitarbeiter der Hochschule 21, schätzt das Engagement: „Wir waren positiv überrascht, mit welcher Bereitschaft Siko zukunftsfähige Projekte fördert und wie viel Beratungsengagement ihrerseits hineinfließt. Anfangs wussten wir noch gar nicht genau, welche Anforderungen wir tatschlich an die Sensoren hatten. Das wurde gemeinsam erarbeitet und definiert.“
In erster Linie mussten mögliche Sensoren robust und unempfindlich gegenüber den rauen Outdoor-Bedingungen sein (Matsch, Staub, Regen, starke Sonneneinstrahlung, Bodenunebenheiten). Komponenten aus dem Pure.Mobile-Sensorbaukasten von Siko sind besonders für den Einsatz in mobilen Maschinen unter widrigen Umgebungsbedingungen geeignet. Am hinteren Teil des Gefährts ist ein Doppelrad verbaut, das sich drehen kann und so die Lenkung erzeugt. Der Lenkwinkel wird durch den magnetischen Drehgeber WV5800M aufgenommen, verarbeitet und an die Steuerung gesendet. Es handelt sich um einen Multiturn-Drehgeber, mit dem auch mehrere Umdrehungen absolut erfasst werden können. Sollte die Spannung einmal unterbrochen werden, zum Beispeil weil die Akkus leer sind, ist der zuvor eingestellte Lenkwinkel immer noch vorhanden. Ohne Absolutwertgeber würde dieser beim erneuten Hochfahren des Fahrzeugs fälschlicherweise als Null-Grad-Winkel definiert werden. Das magnetische Messprinzip kommt den Anforderungen an Robustheit und Unempfindlichkeit entgegen. Überzeugt hat das Projektteam auch die hohe Präzision und Zuverlässigkeit des Drehgebers, damit das Fahrzeug stets den Lenkwinkel so anpasst, dass es seinen definierten Pfad umsetzen kann – ohne Ausfallerscheinungen und zu große Toleranzen.
Um hier die Sicherheit, auch in der Interaktion mit in der Plantage arbeitenden Personen, noch zu erhöhen, soll für künftige Fahrzeuge die Safety-Variante des Drehgebers, WV58MR, mit redundanter Positionserfassung zum Einsatz kommen, um Ausfälle sicher zu verhindern. In der Entwicklungsphase war zunächst die technische Machbarkeit im Fokus, sodass der Drehgeber ohne Safety-Standard ausreichend war. Der Pluspunkt bei den Siko-Modellen: Die beiden Drehgeber sind baugleich, sodass keine mechanischen Anpassungen der Applikation bei einem Austausch vorgenommen werden müssen. Gewünscht war für die Lenkwinkelerfassung zudem eine CANopen-Schnittstelle, um möglichst viele standardisierte Elektronikkomponenten verwenden zu können, die schnell austauschbar und in das Bus-System integrierbar sind.
Positionssensoren für die Überwachung der Kistenaufnehmer
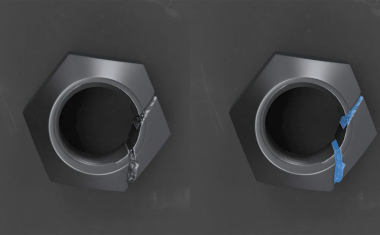
Der zweite Siko-Drehgeber AH25S ist ein Singleturn-Drehgeber, der die Position der Kistenaufnehmer, der sogenannten Flipper, überwacht. Die befüllte Obstkiste wird an vier Punkten über jeweils einen Flipper aufgenommen. Wenn der Roboter über die Kiste hinwegfährt und diese die federbelasteten Aufnehmer touchiert, schwenken die Flipper zur Seite, klappen im Anschluss automatisch wieder aus und befinden sich dann unterhalb der vier Kistenecken zur Aufnahme. Um die Kisten sicher transportieren zu können, muss die jeweilige Position der Flipper bekannt sein: Ist er wirklich zurückgeschwenkt oder hat er sich vielleicht verklemmt?
Befinden sich alle vier Flipper unterhalb der Kiste, um die Aufnahme zu gewährleisten? Der Bauraum ist hier begrenzt, sodass ein Drehgeber in Miniaturausführung gefragt war, der direkt vor Ort ohne spezielle Halterung eingesetzt werden konnte. Hier ist ein Analoggeber ausreichend, da die Dateninformationen weniger kritisch sind als die des Lenkwinkelsensors.
Autorin
Michaela Wassenberg, Freie Journalistin
Anbieter
Siko GmbH
Buchenbach
Deutschland



Meist gelesen

Smarte Beleuchtung als integraler Bestandteil der KI-gesteuerten visuellen Qualitätsprüfung
Das KI-basierte Siemens Inspekto Inspektionssystem bietet einfache Bedienung und Anpassungsfähigkeit an Produktionsbedingungen. Die abgestimmte Beleuchtung liefert klare Bilder selbst bei Herausforderungen.

Chatbots für tote, gefährdete und ausgestorbene Sprachen
Möglichkeiten und Grenzen generativer KI für die Weiterbildung.

Es muss nicht immer ein humanoider Roboter sein
Mythomorphes Design eröffnet der sozialen Robotik eine eigene Perspektive. Als Vorbilder dienen Mythen und Fantasiewesen statt Mensch oder Tier. Der Beitrag ordnet Beispiele ein und diskutiert Chancen sowie Risiken.
Warum viele Vision-AI-Projekte trotz guter Modelle scheitern
KI-Modelle liefern in der industriellen Bildverarbeitung oft gute Resultate in der Pilotphase, im Serienbetrieb stoßen sie aber schnell an Grenzen.

Die smarte Trafostation
Jahrzehntelang galt die Trafostation als Black Box – vor Überhitzung geschützt, aber wenig transparent. Das ändert sich mit einem webfähigen Universalrelais.