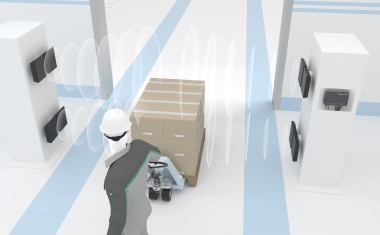
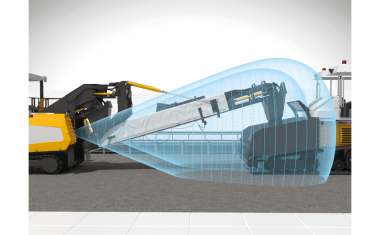
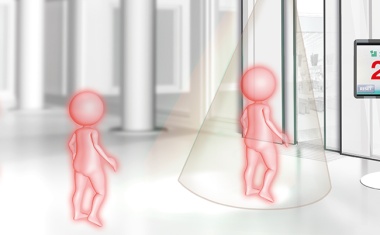
Für den Betrieb von fahrerlosen Transportfahrzeugen (FTF) sind zwei Funktionen essenziell: die zuverlässige Navigation und die Absicherung des Fahrzeugs. Für die Navigation existieren unterschiedliche Methoden. Neben der Spurführung kommt auch die Navigation per Lidar-Sensoren zum Einsatz, die entweder in einer Werkshalle angebrachte Reflektoren nutzen oder über die eingelernte Umgebungskontur navigieren.