
Roboterbasierte Bauteil-Vermessung mit 6-Achser
Handlingroboter für eine produktionsnahe Qualitätskontrolle großer Bauteile innerhalb weniger Minuten
Viele Industrieprodukte müssen hohe Standards erfüllen – und erfordern deshalb eine präzise und reproduzierbare Messung zur Qualitätskontrolle. Während sich dies zum Beispiel für eine sicherheitsrelevante Schraube relativ schnell realisieren lässt, ist die Vermessung größerer Bauteile weit aufwändiger. Um beispielsweise eine Autotür präzise zu vermessen, benötigt eine herkömmliche Koordinatenmessmaschine oder Streifenlichtprojektion bis zu zwei Stunden. Zudem muss das Prüfteil aus dem Produktionsprozess ausgeschleust werden, was ebenfalls Zeit kostet.
Vor diesem Hintergrund wird deutlich, dass die Vermessung solcher größeren Bauteile vor allem in schnell getakteten Produktionsprozessen nur stichprobenartig erfolgen kann. Dem steht allerdings der dringende Wunsch vieler Branchen nach einer Steigerung der Prüfquote entgegen, idealerweise auf 100 Prozent. Gerade die Automobilindustrie strebt eine solche kontinuierliche Qualitätskontrolle an. Dass geeignete Anlagen zur Atline- oder Inline-Vermessung dennoch weitgehend fehlen, liegt an der Komplexität der Aufgabenstellung. Denn die von einer Koordinatenmessmaschine gewohnte hohe Präzision muss in deutlich kürzeren Durchlaufzeiten gewährleistet sein.
Dieser Herausforderung hat sich das auf Systeme und Services für Industrie-Messungen spezialisierte Unternehmen MQS angenommen. Das Ergebnis aus rund 18 Monaten Entwicklungsarbeit ist die roboterbasierte Lösung Mantis. Seit November 2020 läuft eine erste Demozelle im Praxisbetrieb – was bisher Stunden dauerte, schafft die Anlage in wenigen Minuten.
-
 Bild: Yaskawa
Bild: Yaskawa -
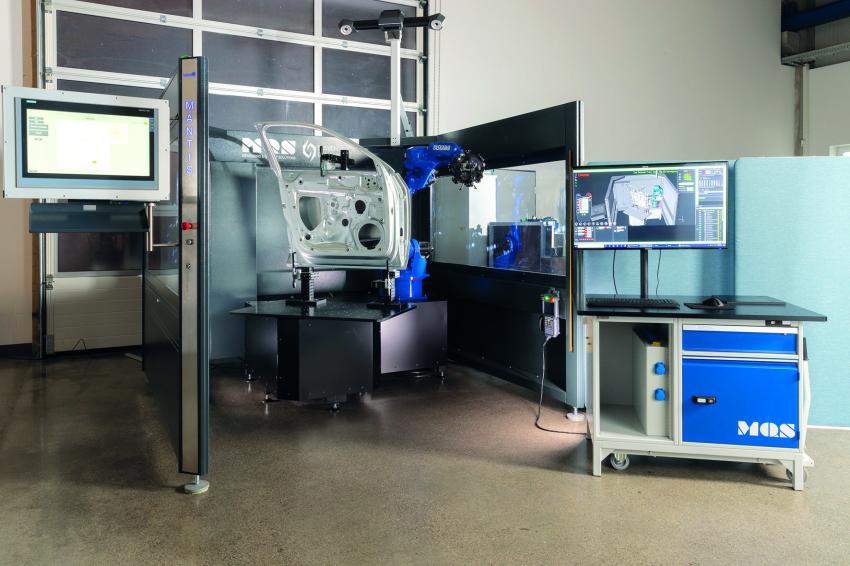 Mantis, die automatisierte und voll integrierbare Turn-Key-Lösung für die Messtechnik, verbindet als schlüsselfertige Komplettzelle mehrere Elemente: das eigentliche Messsystem, bestehend aus einem Messkopf (Scanner) und einer Kamera (Tracker), einen Handlingroboter, auf dem der Messkopf sitzt, und einen Drehtisch zur flexiblen Positionierung des Prüfteils. Bild: Yaskawa
Mantis, die automatisierte und voll integrierbare Turn-Key-Lösung für die Messtechnik, verbindet als schlüsselfertige Komplettzelle mehrere Elemente: das eigentliche Messsystem, bestehend aus einem Messkopf (Scanner) und einer Kamera (Tracker), einen Handlingroboter, auf dem der Messkopf sitzt, und einen Drehtisch zur flexiblen Positionierung des Prüfteils. Bild: Yaskawa -
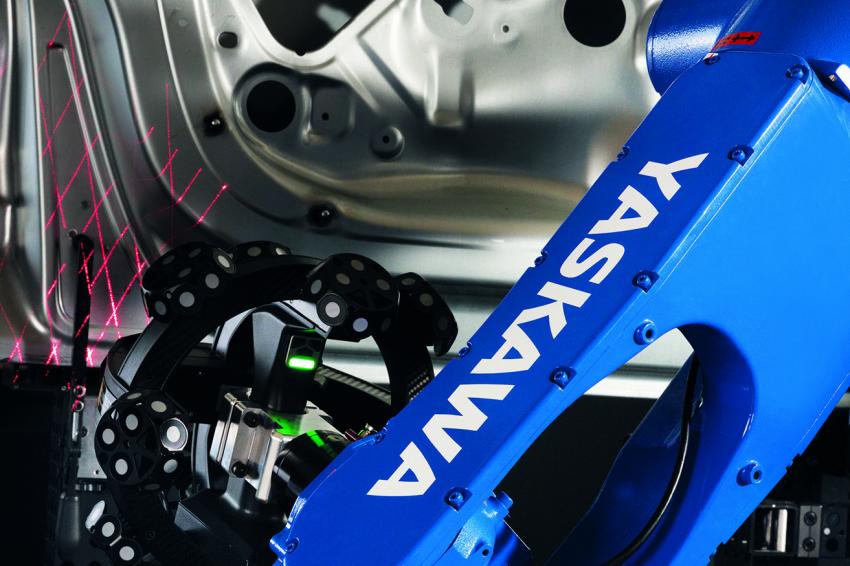 Geführt von einem Motoman GP12, scannt der Messkopf das zu prüfende Bauteil detailliert ab, wobei drei Laser zum Einsatz kommen. Die Messdauer für eine Auto-Seitentür beträgt rund fünf Minuten. Bild: Yaskawa
Geführt von einem Motoman GP12, scannt der Messkopf das zu prüfende Bauteil detailliert ab, wobei drei Laser zum Einsatz kommen. Die Messdauer für eine Auto-Seitentür beträgt rund fünf Minuten. Bild: Yaskawa
Voll integrierbare Komplettzelle
Die schlüsselfertige Komplettzelle verbindet mehrere Elemente: das eigentliche Messsystem, bestehend aus einem Messkopf (Scanner) und einer Kamera (Tracker), einen Handlingroboter, auf dem der Messkopf sitzt, und einen Drehtisch zur flexiblen Positionierung des Prüfteils. Die über der Zelle positionierte Kamera erinnert dabei an eine Gottesanbeterin – daher auch der Name der Zelle: „Mantis ist die lateinische Bezeichnung für das Raubinsekt“, erklärt Andreas Zacherl, Automationsexperte bei MQS.
Die eigentliche Vermessung übernimmt der Messkopf, ein Zulieferprodukt von Scantech. Geführt vom Roboterarm scannt er das zu prüfende Bauteil detailliert ab, wobei drei Laser zum Einsatz kommen. Die Kamera überwacht dabei permanent die Position des Messkopfs. „Der Scanner weiß also immer genau, wo er sich gerade befindet“, beschreibt Andreas Zacherl das Zusammenspiel der beiden Komponenten. Zusätzlich orientiert sich der Scanner an mehreren Markierungspunkten auf dem Drehtisch. Durch diese Punktewolke ist sichergestellt, dass die Messposition auch nach dem Drehen bzw. Bewegen des Prüfteils exakt berechenbar bleibt. Aktuell erreicht das System eine Messgenauigkeit bis zu unter drei Hundertstel Millimeter (1/100 mm). Die Messdauer für eine Auto-Seitentür beträgt rund fünf Minuten.
Neben den kombinierbaren Hardware-Komponenten bildet eine anwendungsspezifische, bedienungsfreundliche Software des Entwicklungspartners Eleven Dynamics die zweite Säule des automatisierten Messkonzepts. Die automatisierte Messung erfolgt anhand hinterlegter CAD-Daten bzw. dort festgelegter Prüfpunkte und Messpläne. Als Offline- wie als Online-Plattform ermöglicht die Mantis dabei die Integration neuer Technologien und skaliert den Nutzen bestehender Methoden für zukünftige Anwendungen. So lässt sich die Zelle beispielsweise problemlos um eine automatisierte Bestückung ergänzen oder in komplette Produktionslinien einbinden.
Ausschlaggebend war die Beweglichkeit
Die Entscheidung für Yaskawa als Roboterhersteller fiel zunächst aus einem ganz einfachen Grund: „Für uns war die räumliche Nähe das Hauptargument für die Kontaktaufnahme. Allershausen ist lediglich eine halbe Autobahnstunde von uns entfernt“, so Andreas Zacherl. „Im weiteren Projektverlauf haben wir dann schnell auch die sehr gute Zusammenarbeit schätzen gelernt.“
Beraten von Yaskawa, fiel die Wahl auf die Handlingroboter-Serie Motoman GP. Ausschlaggebend war in diesem konkreten Fall vor allem die hohe Beweglichkeit der 6-Achser: „Der Manipulator muss sich sehr stark verbiegen können“, beschreibt Andreas Zacherl die besonderen Anforderungen, „zum einen, um zum Beispiel auch die Unterseite des Messobjekts zu erreichen, zum anderen, damit der Roboterarm den Messkopf nicht verdeckt bzw. bei der Aufnahme behindert.“
Die Voraussetzung dafür schafft das schlanke Armdesign, das Störkonturen mit der Peripherie minimiert. Der Hohlarm für die interne Leitungsführung erhöht die Standfestigkeit der Medienkabel zu den jeweiligen Aktoren, hier zum Messkopf. Bei allen Modellen der GP-Serie ist für die Verbindung zwischen Manipulator und Steuerung zudem nur ein Roboterkabel notwendig. Die Vorteile dieser Lösung liegen in einem geringeren Verschleiß und einer einfachen Wartung. Zudem ermöglicht das eine schnelle und problemlose Inbetriebnahme − vor allem beim Einbau in den Kabelschlepp einer Fahrbahn. Eine hohe Verfügbarkeit ist auch in raueren Umgebungen gewährleistet. Die Handgelenksachsen des Roboters sind standardmäßig in Schutzklasse IP67 ausgeführt, die Hauptachsen in Schutzklasse IP54.
In der Demozelle kommt ein Motoman GP12 zum Einsatz. Dafür sprach weniger die maximale Tragkraft von 12 kg, da der Messkopf vergleichsweise leicht ist. Auch die hohe Positioniergenauigkeit des Roboters wird durch die präzise optische Überwachung der Messkopfposition nicht in vollem Umfang benötigt. Allerdings bietet der Roboter eine Reichweite von 1.440 mm. Für größere bzw. auch kleinere Bauteile bietet die Motoman-GP-Reihe zudem weitere Modellvarianten mit 550 bis 4.004 mm Reichweite.
Gesteuert werden die Roboter der GP-Serie mit der Steuerung Motoman YRC1000. Offene Schnittstellen prädestinieren diese Steuerungsgeneration für den Einsatz in vernetzten Umgebungen. Das Programmierhandgerät der YRC1000-Steuerung wiegt 730 Gramm. Der Touchscreen ermöglicht eine intuitive Bedienung und damit ein einfaches Bewegen und Scrollen mit dem Cursor. Auf dem Bildschirm des Programmierhandgeräts kann eine 3D-Simulation der Roboterbewegung vor und während des Betriebs mit dem echten Roboterarm erfolgen.
Autor
Jürgen Riedinger, Senior Sales Manager GI Robots & Products
Kontakt
Yaskawa Europa GmbH
Ohmstr. 4
91074 Herzogenaurach
+49 9132744 129
+49 9132 744 104




