
Zeit und Kostenersparnis durch realitätsnahe Simulation von Greifprozessen
26.09.2019 -
-
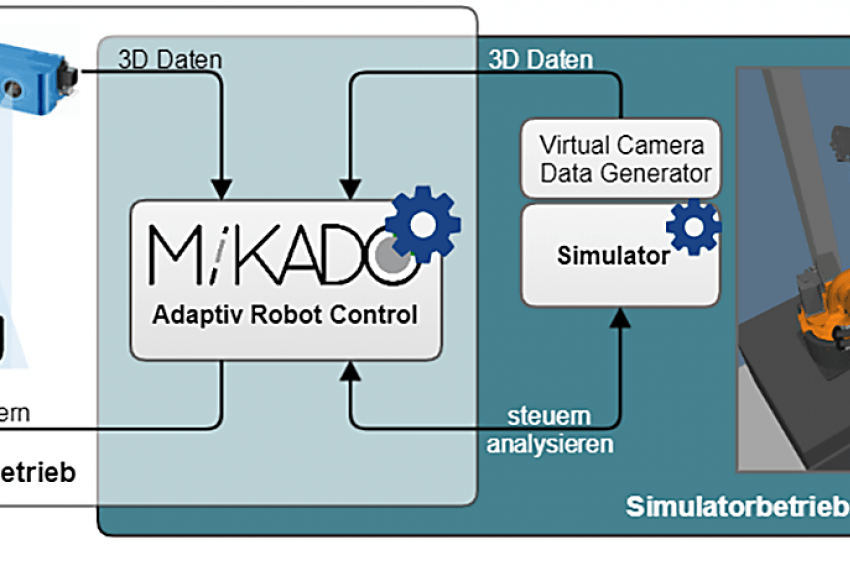 Im Simulatorbetrieb arbeitet Mikado ARC völlig unabhängig von der realen Roboterzelle
Im Simulatorbetrieb arbeitet Mikado ARC völlig unabhängig von der realen Roboterzelle -
 Durch die Simulation neuer Bauteile und Prozesse einer Robotik-Anwendung lassen sich Entwicklungszeit und Kosten einsparen
Durch die Simulation neuer Bauteile und Prozesse einer Robotik-Anwendung lassen sich Entwicklungszeit und Kosten einsparen
Durch Robot Vision können heute viele Industrieprozesse wirtschaftlich automatisiert werden. Doch bereits die Projektierung einer Robotik-Anwendung ist komplex und zeitintensiv. Frühzeitige Tests der Hardware und Software sollen Störungen bei der Inbetriebnahme vermeiden. Auch bei späteren Prozessänderungen an einer betriebsbereiten Anlage kommt es immer noch zu langen Stillstandzeiten und hohen Rüstkosten. Die Entwicklung und Optimierung von Greifprozessen erfolgt mit dem neuen Mikado ARC Simulator vollständig virtuell und reduziert damit deutlich die Inbetriebnahmezeit am Roboter und die Entwicklungskosten für neue Hardwarekomponenten.
In der industriellen Produktion ist die Robotik eine der am schnellsten wachsenden Technologien. Sie ermöglicht Automatisierern eine hohe Fertigungsflexibilität bei gleichzeitig hoher Prozesssicherheit und Produktivität. Sensoren und moderne Kameratechnik schaffen eine virtuelle Abbildung der Realität, die Roboter befähigt, ihre Umgebung adaptiv zu erfassen und auf Situationen zu reagieren. Beim „Griff in die Kiste" mit chaotisch liegenden Teilen ermittelt die Robotersteuerung mithilfe einer dreidimensionalen Abbildung in Form einer 3D-Punktewolke, wie Teile sicher gegriffen und lagerichtig weitergereicht werden können. Was für den Betrachter so einfach und selbstverständlich aussieht, sind komplexe Prozesse mit viel Fehlerpotenzial. Ein Roboter führt seine Griffe nur sicher und reproduzierbar aus, wenn viele Faktoren vor Realisierung der Greifsituation bekannt sind und in die Entwicklung einfließen können.
Mögliche Fehlerquellen und Störungen möchten Systemintegratoren schon während der Planungs- und Konzeptionsphase weitestgehend ausräumen, um Stillstandzeiten während des produktiven Betriebs und zeitintensive Nacharbeiten zu vermeiden. Doch lange Testphasen mit aufwändig gefertigten Prototypen kann die Entwicklung eines Projekts schon im Vorfeld unrentabel machen. Auch die Optimierung von Taktzeiten oder des Entleerungsgrads kann eine laufende Bin Picking Anwendung längere Zeit still legen. Wie können Systemintegratoren die Planung, Inbetriebnahme und Wartung einer Robotikanlage dennoch wirtschaftlich durchführen?
Simulierte Inbetriebnahme
Robotersteuerungslösungen wie Mikado ARC ermöglichen Systemintegratoren die Modellierung der Roboterzelle, der Greiferausführung und viele weitere Basisparameter als digitales Abbild einer realen Szene. Mit diesem sogenannten „digitalen Zwilling" kann das Anlagenkonzept bereits in automatisch laufenden Simulationsläufen verifiziert und verbessert werden, obwohl zu diesem Zeitpunkt noch kein einziger Prototyp in Realität gefertigt wurde. Die Simulation der Hardwarekomponenten wird mithilfe der Planungsdaten und der realen Mikado Steuertechnik durchgeführt. Dadurch zeigt diese virtuellen Inbetriebnahme Ergebnisse und potenzielle Probleme des geplanten Anlagenkonzepts auf. Schneller, kostengünstiger und mit viel größeren Variationsmöglichkeiten als es mit einer realen Testanlage möglich wäre. Und alle dabei ermittelten Erkenntnisse und Parameter können bei der folgenden realen Inbetriebnahme 1:1 weiter verwendet werden.
Mit der „virtuellen Kameratechnik" erweitert Mikado ARC zudem die Möglichkeiten der Simulation, wodurch sich 3D-Kameradaten adaptiv aus jeder möglichen Ansicht einer Greifsituation synthetisch erzeugen lassen. Das heißt, es müssen keine Kamerabilder einer nachgestellten realen Szene aufgenommen und für die Simulation importiert werden. Sowohl spezielle Problemfälle als auch zufällige Situationen sind damit beliebig oft, hundertprozentig reproduzierbar. Schon während der Planung der Roboterzelle gibt die „virtuelle Kameratechnik" dem Systemintegrator Anhaltspunkte wo und wie viele Ensenso 3D-Kameras benötigt werden. Variationen von Modell, Anzahl und Sichtwinkel der Kameras lassen sich im Simulatorbetrieb einfach und kostengünstig Vor-Evaluieren.
Der Simulator ist eine parallel arbeitende Software, die Mikado ARC mit 3D-Daten der virtuellen Realität versorgt und zusätzlich jede Aktion und Reaktion der Robotersteuerung für den Anwender protokolliert und auswertet. Die Mikado Steuerungstechnik arbeitet mit den virtuellen Daten als wären sie von realen Kameras aufgenommen, berechnet Roboterfahrten, plant automatisch kollisionsfreie Bahnen und greift simulierte Teile aus virtuellen Kisten. Damit visualisiert Mikado ARC auf einfache Art die Arbeitsweise des Roboters und nutzt das Interface zwischen realer und virtueller Welt, um die Produktivität einer Roboteranwendung zu optimieren.
Taktzeiten optimieren durch Simulation
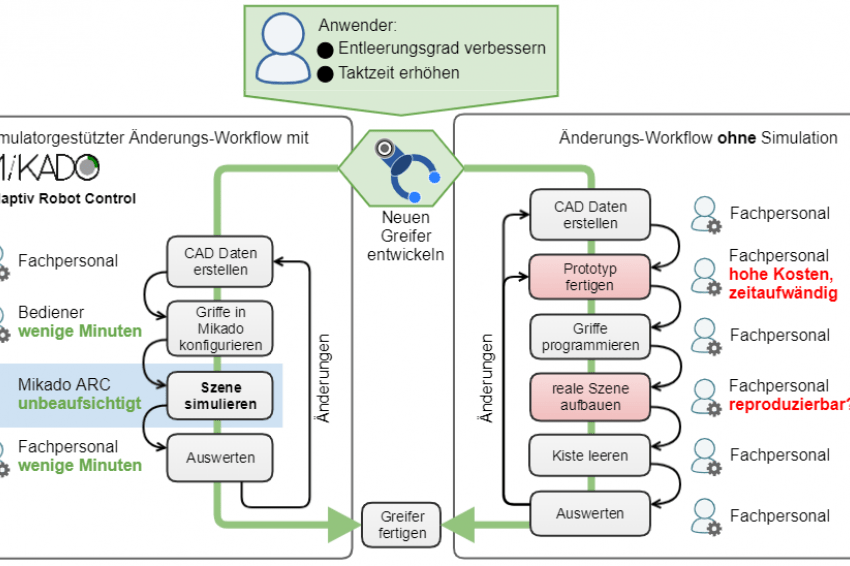
Auch die Umrüstung einer Bin Picking Anwendung auf neue Teile bzw. eine Optimierung der Taktzeiten oder des Entleerungsgrads der verwendeten Teile-Behälter unterstützt die adaptive Robotersteuerung Mikado ARC durch den simulator-gestützten Workflow. Durch Verwendung von 3D-Daten der Ensenso Kameras und CAD-Daten neuer Bauteile und Greiferprototypen erstellt der Mikado ARC Controller eine realitätsnahe, virtuelle Simulation der Greifsituation. Mithilfe der neuen „virtuellen Kameratechnik" mit integrierter Physik-Engine lassen sich auch die Behälter mit virtuellen Teilen synthetisieren und in beliebiger Anzahl zufällig „befüllen“. Damit können Griff-Variationen oder auch neue Greifer virtuell ausprobiert werden. Die Auswertung der Simulation ermöglicht verlässliche Vorhersagen über Taktzeiten und den erreichbaren Entleerungsgrad der Boxen. Basierend auf diesen Simulatorergebnissen können die CAD-Daten eines neuen Greifer-Entwurfs solange verbessert werden, bis die Vorgaben erreicht werden. Die zeit- und kostenintensive Fertigung von Prototypen ist damit nur einmal vor der realen Inbetriebnahme am Roboter notwendig.
Zusammenfassung
Die Inbetriebnahme und Optimierung von Bin Picking Anwendungen kann mit der Robot-Vision-Komplettlösung Mikado ARC von isys Vision einfach, schnell und kostensparend durchgeführt werden. Sie bringt mehr Flexibilität in die Produktionslinie und erlaubt zudem eine effiziente Automatisierung im Prototypenbau und Kleinserien. Anwender können dem Roboter in kürzester Zeit, auch ohne Robotik Spezialwissen, viel Neues beibringen. Teilewechsel nimmt ein Maschinenbediener ohne Programmieraufwand in wenigen Minuten selbst vor. Zudem lassen sich mit den neuen Simulationsmöglichkeiten Stillstandzeiten und Rüstkosten auf ein Minimum reduzieren. Damit ist Mikado ARC für die Projektplanung, Entwicklung und Wartung einer Robotik-Anwendung das ideale Werkzeug. Mit exklusivem Vertrieb durch IDS Imaging Development Systems GmbH und deutschem Hersteller „direkt um die Ecke" ist auch eine Unterstützung bei kniffligen Inbetriebnahmen oder eine Sonderfeature-Entwicklung durch einfache und unmittelbare Absprache kein Problem. Mit direkter Anbindung an Maschinensteuerungen mittels Industrieprotokollen wie Profinet oder OPC-UA ist die adaptive Robotersteuerung zudem schon jetzt für Industrie 4.0 gerüstet.




