
Prüfen unter EMV-Bedingungen
Fahrzeugtests: ADAS-Funktionen und Störfestigkeitsmessungen parallel testen
Das ADAS-Testsystem durchläuft im Prüfvorgang verschiedene simulierte realitätsnahe Testszenarien, die beim Testfahrzeug (VUT) die ADAS-Funktionen aktivieren und das beabsichtigte Antwortverhalten auslösen sollen. Die Herausforderung dabei ist, dass dies selbst unter den elektromagnetischen Bedingungen sicher funktionieren muss, wenn in der EMV-Messkammer zum Beispiel gleichzeitig die Störfestigkeitsmessungen für das Autoradio ablaufen. Andernfalls lassen sich die ADAS-Funktionen in diesem Umfeld nicht bewerten. Das ADAS-Testsystem setzt sich aus einem Radarechogenerator, einem dynamischen Zielpositionierungssystem und dem EMS-Testsystem (EMS: Electromagnetic Susceptibility bzw. Störfestigkeit) zusammen. In der Regel besitzt ein Fahrzeug einen Weitbereichs-Radarsensor für die automatische Distanzregelung und mehrere Nahbereichs-Radarsensoren für Kollisionsvermeidungssysteme. Bei den Tests wird zum einen kontrolliert, ob die Sensoren ordnungsgemäß in die Stoßfänger integriert wurden, sodass die Antennen den jeweils vorgesehenen Sektor ausleuchten können. Zum anderen kann in Kombination mit dem dynamischen Zielpositioniersystem auch das Verhalten des ADAS-Systems geprüft werden. Dazu simuliert der Radarechogenerator ein vorausfahrendes Fahrzeug, welches das VUT bei vorab definierten Abständen und bei unterschiedlichen Geschwindigkeiten erkennen muss. Mit ihm kann der Prüffeld-Ingenieur bis zu vier individuell konfigurierbare Testdistanzen einstellen. Zudem ermöglicht er eine kontrollierte Dopplerverschiebung sowie einstellbare Radarquerschnitte. Das Zielpositionierungssystem simuliert zudem einen Spurwechsel von links nach rechts und umgekehrt. Es erlaubt einen Bewegungswinkel von ± 55° von der zentralen Position vor dem VUT.
-
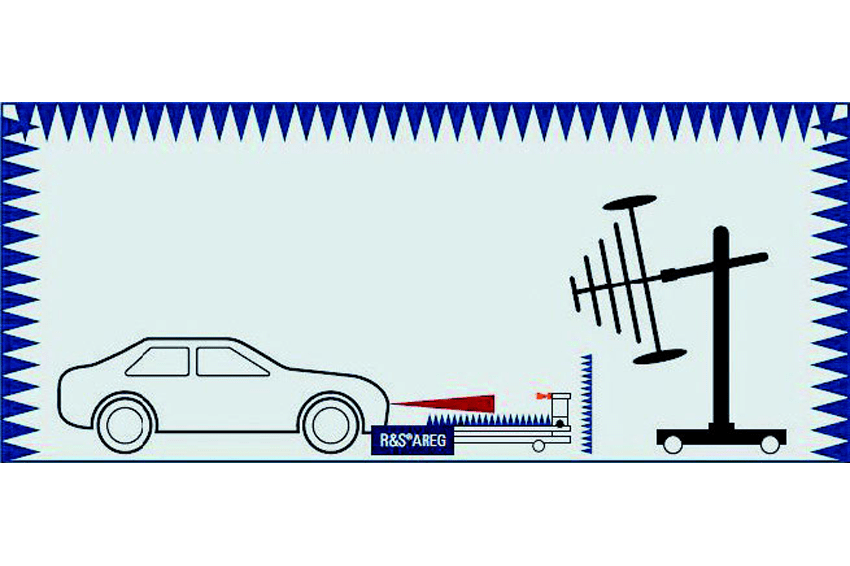 Bild: Rhode + Schwarz
Bild: Rhode + Schwarz -
 Das Zielpositionierungssystem erlaubt einen Bewegungswinkel von ± 55° von der zentralen Position vor dem VUT. Bild: Rhode + Schwarz
Das Zielpositionierungssystem erlaubt einen Bewegungswinkel von ± 55° von der zentralen Position vor dem VUT. Bild: Rhode + Schwarz -
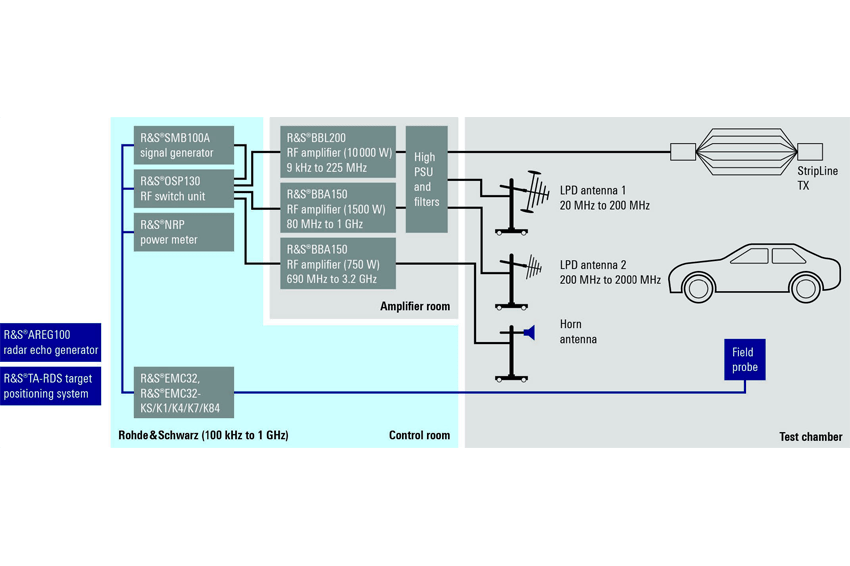 In diesem beispielhaften Testaufbau umfassen die dunkelgrau unterlegten Komponenten das EMS-Testsystem. Radioechogenerator und das Zielpositionierungssystem werden von der EMV-Testsoftware mit angesteuert. Bild: Rhode + Schwarz
In diesem beispielhaften Testaufbau umfassen die dunkelgrau unterlegten Komponenten das EMS-Testsystem. Radioechogenerator und das Zielpositionierungssystem werden von der EMV-Testsoftware mit angesteuert. Bild: Rhode + Schwarz
Prüfung auf korrekte Durchführung
Mit diesen beiden Geräten kann ein Prüfingenieur Szenarien erzeugen, mit denen sich verifizieren lässt, ob das VUT mit aktivierten Abstandstempomat die automatischen Geschwindigkeitsänderungen und auch die automatischen Notbremsungen korrekt ausführt. Das EMS-Testsystem leitet zudem elektromagnetische Störungen in das VUT ein, um dadurch verursachte Leistungseinbußen zu erkennen. Absorber-Stellwände sollen die Signale anderer Ziele vor dem zu testenden Radarsystem abschirmen, dabei aber nicht das Sichtfeld des Radarsensors zum Radarechogenerator einschränken. Sind der geprüfte Radarsensor und der Radarechogenerator mit einer eindeutigen und identischen Dopplerverschiebung konfiguriert, können zudem unerwünschte Echos durch Mehrwegeausbreitung wie zum Beispiel Radarechos mit abweichender Dopplerverschiebung von anderen Prüfstanden oder aufgrund paralleler Tests herausgefiltert werden.
Das EMS-Testsystem kann die geleiteten und gestrahlten Störfestigkeitsmessungen gemäß ISO 114511-2 automatisiert ausführen. Es besteht aus einem Signalgenerator mit mehreren Verstärkern sowie Antennen für verschiedene Frequenzbereiche, um die nötige Feldstärke für die Störfestigkeitsmessungen am Fahrzeug zu erzeugen. Abbildung 1 zeigt einen beispielhaften Testaufbau mit einem Testsystem (dunkelgrau unterlegt) für Frequenzen von 9 kHz bis 3,2 GHz. Die EMV-Testsoftware des Systems ermöglicht die automatischen Störfestigkeitsmessungen und kann zudem die zu testende Elektronik überwachen. Die Software steuert darüber hinaus auch den Radarechogenerator sowie das Positionierungssystem für die automatischen ADAS-Tests an.
Testablauf
Zunächst testet der Prüfingenieur die Radarsensoren an der Fahrzeugfront sowie die ADAS-Funktionen Tempomat und autonome Notbremsung ohne zusätzliche Störer, um vor dem EMS-Test unvorhergesehene Probleme auszuschließen und sicherzustellen, dass das System grundsätzlich korrekt funktioniert. Im zweiten Schritt werden Störfestigkeitssignale in das Testszenario eingeleitet. Diese sollen typische Störfestigkeitsmessungen an Autoradios simulieren und erreichen eine maximale Feldstärke bis 30 V/m.
Für die Funktionstests rollt das VUT auf dem Fahrzeugprüfstand, während die jeweilige ADAS-Funktion aktiviert ist. Das System zeichnet auf, sobald Anomalien oder Fehlfunktionen aufgrund von elektromagnetischen Störungen auftreten. Das Antwortverhalten des VUT wird über die Radgeschwindigkeit auf dem Prüfstand, die Bremsleuchten sowie über angezeigte Ereignisse per Warnleuchten oder auf dem Bildschirm der Fahrerkonsole ermittelt. Dazu wurde eine EMC-Kamera im Fahrzeug positioniert. Um die Tempomat-Funktion zu testen, wird 15 Meter vor dem VUT ein Fahrzeug simuliert, das zunächst gleich schnell fährt wie das VUT auf dem Prüfstand. Das simulierte Objekt sollte auf dem Fahrerbildschirm angezeigt werden. Dann bremst das simulierte Fahrzeug etwas ab und beschleunigt wieder. Das VUT muss seine Geschwindigkeit entsprechend anpassen, aber nur bis zur eingestellten Geschwindigkeit des Tempomats und nicht darüber hinaus. Zum Testen der Notbremsfunktion fährt das VUT mit konstanter Geschwindigkeit, bis ein vorausfahrendes simuliertes Fahrzeug plötzlich abbremst. Dabei werden zwei Testszenarien geprüft: einmal ein konstant vorausfahrendes simuliertes Fahrzeug und einmal eines, das vor dem VUT plötzlich die Spur wechselt und bremst. Hierzu müssen Frontradarsensor und der Echogenerator auf dem Positionierungssystem genau zueinander justiert werden. Wenn der Sensor hinter seiner Abdeckung von außen nicht sichtbar ist, kann seine genaue Position mit Hilfe eines Laser-Pointers ermittelt werden. Insgesamt wurden auf dem Fahrzeugprüfstand mit induzierten Störsignalen zehn verschiedene Testszenarien für den Tempomat und vier für die autonome Notbremsung durchgeführt. Dabei stieg die Feldstärke auf 30 V/m.
Fazit: Parallele Prüfung für optimale Ausnutzung
Um die Zeit in einer EMV-Messkammer möglichst effizient zu nutzen, lassen sich die ADAS-Funktionen prüfen, während parallel dazu die Störfestigkeitsmessungen am Infotainmentsystem ablaufen. Wichtig ist, dass der Radarsensor bei den Messungen ein uneingeschränktes Sichtfeld zum Radarechogenerator hat und beide genau zueinander justiert sind. Normkonforme Störfestigkeitsmessungen an Radarsensoren nach ISO 11451-2 finden im Frequenzbereich von 10 kHz bis 18 GHz statt und erreichen typischen Feldstärken bis 200 V/m. Auch diese kann der Prüfingenieur mit einem entsprechend ausgelegten EMS-Testsystem auf dem Prüfstand durchführen.
Autoren
Sam Chew, Technischer Vertrieb für EMV Projekte
Jacky Li, Senior Systemingenieur
Kontakt
Rohde & Schwarz GmbH & Co. KG
Mühldorfstraße 15
81671 München
Deutschland
+49 89 41 29 0




