
3D-Lage- und Positionserkennung – auch ohne geometrische Prototypen
Einrichtung von Bildverarbeitungslösungen zur 3D-Lageerkennung bereits in der Planungsphase der Roboterzelle
-
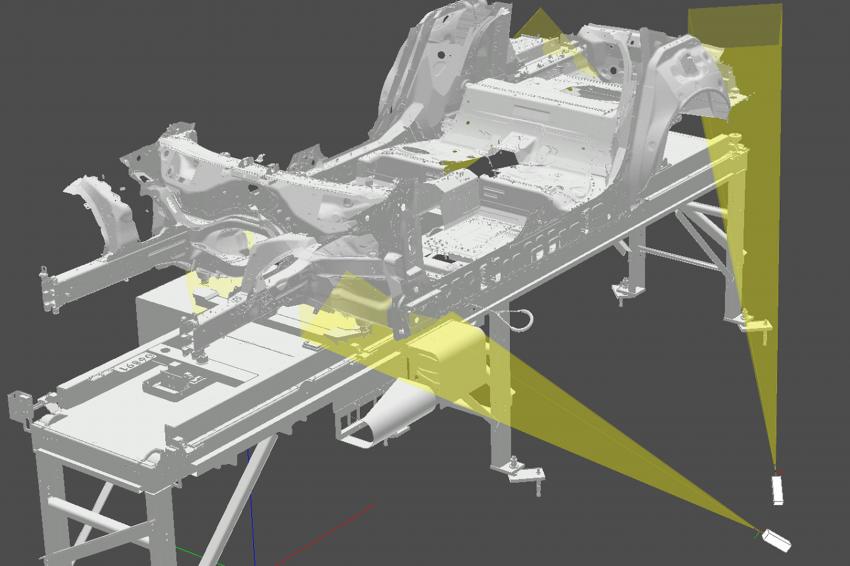 Noch bevor ein erster geometrischer Prototyp verfügbar ist, kann mit einem Bildverarbeitungssystem die präzise dreidimensionale Lageerkennung von Fahrzeugkarossen eingerichtet und an eine Robotersteuerung angebunden werden. (Bild: VMT)
Noch bevor ein erster geometrischer Prototyp verfügbar ist, kann mit einem Bildverarbeitungssystem die präzise dreidimensionale Lageerkennung von Fahrzeugkarossen eingerichtet und an eine Robotersteuerung angebunden werden. (Bild: VMT) -
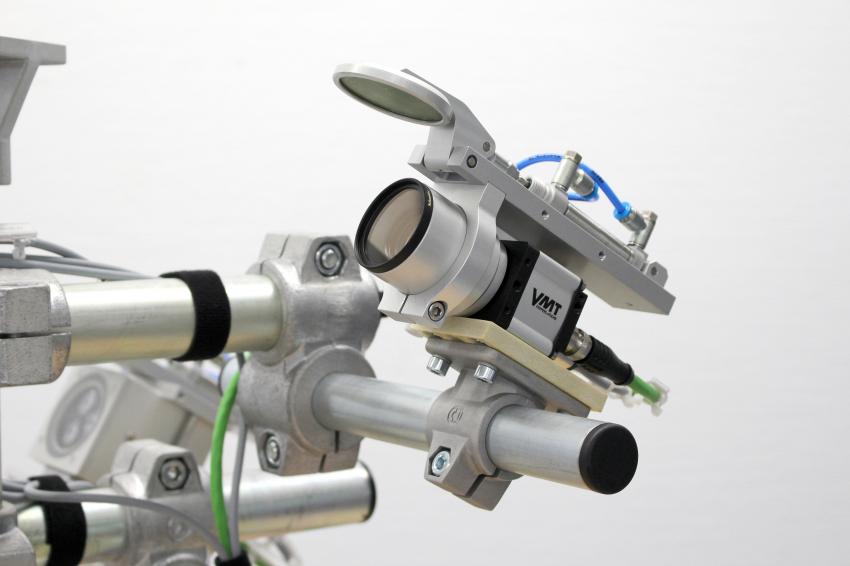 VMT 3D kann zur berührungslosen Lageerkennung ganzer Fahrzeugkarossen, aber auch von Blechteilen aus dem Presswerk, von Front-, Heck- und Bodenbaugruppen sowie von Anbauteilen wie Türen oder Seitenwänden eingesetzt werden. (Bild: VMT)
VMT 3D kann zur berührungslosen Lageerkennung ganzer Fahrzeugkarossen, aber auch von Blechteilen aus dem Presswerk, von Front-, Heck- und Bodenbaugruppen sowie von Anbauteilen wie Türen oder Seitenwänden eingesetzt werden. (Bild: VMT)
Das Bildverarbeitungssystem VMT 3D kann zur berührungslosen Lageerkennung ganzer Fahrzeugkarossen, aber auch von Blechteilen aus dem Presswerk, von Front-, Heck- und Bodenbaugruppen sowie von Anbauteilen wie Türen oder Seitenwänden eingesetzt werden. Im Betrieb stellt die Lösung Robotern, die Karossen bearbeiten, beispielsweise Komponenten durch Schweißen, Kleben oder Nieten miteinander verbinden oder sie für Montageprozesse greifen und positionieren, Korrekturvektoren für die Bahnsteuerung zur Verfügung. Diese passen die Applikationsbahnen des Roboters an die von mehreren Kameras gemessenen Positionstoleranzen an und gewährleisten so eine optimale Anlagenverfügbarkeit. Dabei lässt sich das Bildverarbeitungssystem einrichten, bevor die ersten geometrischen Karossen-Prototypen zur Verfügung stehen.
Mechanische Zentrierung bremst Taktzeit
In der Automobilproduktion werden im Fahrzeug-Rohbau Blechteile, Baugruppen und Anbauteile schrittweise zu Karosserien zusammengefügt. Diese werden über Förderbänder zu den einzelnen Stationen der Fertigungslinie befördert und dort für die jeweiligen Produktionsschritte bereitgestellt. Unvermeidbare Toleranzen der Fördertechnik führen dazu, dass sich Karossen in einer Station in leicht unterschiedlichen Positionen befinden können. Robotergestützte Arbeitsschritte erfordern jedoch eine präzise und wiederholgenaue, dreidimensionale Referenzlage – die bislang (noch) mechanisch gewährleistet wird. Hierbei wird die Karosse durch Absteckbolzen, die in definierte Aufnahmeaussparungen in den Fahrzeugkörper einfahren, zentriert und durch leichtes Anheben prozessgerecht positioniert. Dieses Verfahren hat jedoch Nachteile: unter anderem eine nicht dokumentierbare und im Zeitverlauf driftende Genauigkeit, eine hohe Inflexibilität bei neuen Karossenderivaten, neuen Fahrzeugtypen oder Änderungen der Aufnahmeaussparungen, Kosten für immer wiederkehrende Anpassungen sowie Wartungsaufwand durch Verschleiß an den Bolzen und der Aufnahmemechanik. Der gewichtigste Nachteil aber ist, dass das mechanische Aufnehmen, Anheben und Absenken der Karosse zu Lasten wertvoller Taktzeit gehen.
Kamerabasierte Bildverarbeitungslösungen wie VMT 3D vermeiden diese Nachteile und treiben daher seit einiger Zeit den Paradigmenwechsel bei der Positionierung von Karossen voran. Die Lösung des Systemanbieters VMT aus Mannheim kann bereits bei der Planung der Roboterzelle eingerichtet werden – ohne Warten auf Produktionsmuster oder Prototypen. VMT 3D kann flexibel und kostengünstig um neue Geometrien ergänzt werden, ist selbstüberwachend und dokumentationsfähig. Im Betrieb ist das 3D-Lageerkennungssystem jederzeit erweiterbar, beispielsweise durch Hinzufügen einer Kamera oder Einlernen neuer Antastmerkmale.
-
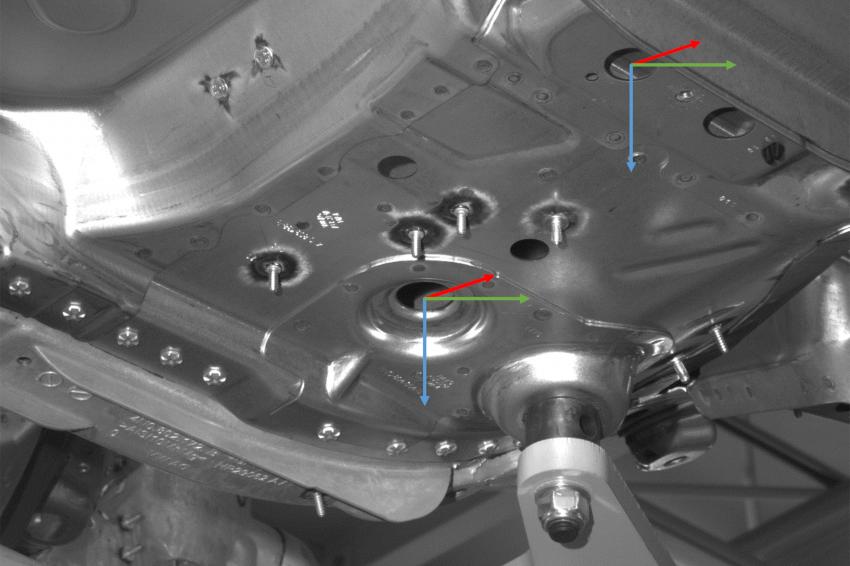
 Aus deren jeweiliger Position bestimmt die Software des Bildverarbeitungssystems auf wenige Zehntel Millimeter genau die tatsächliche Ist-Position der Karosse und berechnet den Bahnvektor, um den die programmierte Roboterbewegung korrigiert wird. (Bild: VMT)
Aus deren jeweiliger Position bestimmt die Software des Bildverarbeitungssystems auf wenige Zehntel Millimeter genau die tatsächliche Ist-Position der Karosse und berechnet den Bahnvektor, um den die programmierte Roboterbewegung korrigiert wird. (Bild: VMT) -
 Aus deren jeweiliger Position bestimmt die Software des Bildverarbeitungssystems auf wenige Zehntel Millimeter genau die tatsächliche Ist-Position der Karosse und berechnet den Bahnvektor, um den die programmierte Roboterbewegung korrigiert wird. (Bild: VMT)
Aus deren jeweiliger Position bestimmt die Software des Bildverarbeitungssystems auf wenige Zehntel Millimeter genau die tatsächliche Ist-Position der Karosse und berechnet den Bahnvektor, um den die programmierte Roboterbewegung korrigiert wird. (Bild: VMT)
Virtuelle Offline-Auslegung vor der Inbetriebnahme
Zur Philosophie von VMT als Systemanbieter gehört es, nicht alleine Hard- und Software zu liefern, sondern die Lösung durchgängig mit dem Kunden oder Anwender gemeinsam umzusetzen. Dies zeigt sich bei VMT 3D darin, dass die 3D-Lageerkennung lange vor der Verfügbarkeit eines ersten Prototypen eingerichtet werden kann – also die spezifischen Rahmenbedingungen dieses Kundensegmentes berücksichtigt. Sowohl bei der Anlagenplanung als auch beim Neubau einer Roboterzelle oder beim Retrofit kann so die Zeit für das Warten auf die reale Karosse sinnvoll genutzt werden – zumal, wenn wie üblich die CAD-Daten der Roboterzelle und der Fahrzeugkarosse(n) bereits vorliegen und genutzt werden können. Als besonderes Zusatzmerkmal bietet VMT 3D die Option, aus den Daten voraussichtliche Kamerabilder zu erzeugen und zu rendern, um die Merkmalserkennung vorab in der Software umzusetzen – und sie später anhand realer Bilder, wenn überhaupt, nur noch marginal anzupassen. So ist es lange vor der Verfügbarkeit eines Prototyps oder eines ersten Produktionsmodells möglich, anhand der virtuell verfügbaren Fahrzeuggeometrie, des Zellenlayouts und der Arbeitsumgebung die optimalen Positionen und Ausrichtungen der Kameras zu bestimmen oder die am besten erkennbaren, geometrischen Antastmerkmale zu identifizieren und einzulernen. Der Sichtbereich der 3D-Lageerkennung muss also nicht mehr iterativ vor Ort anhand möglicherweise auch unterschiedlicher Karossentypen ermittelt werden. Dadurch kann viel Zeit bei der Inbetriebnahme gespart werden – und auch später, wenn beispielsweise zusätzliche Karossenderivate oder neue Fahrzeugtypen hinzugefügt werden. Hier lässt sich schnell validieren, ob die vorhandenen Kamerasichtbereiche ausreichen oder das System, um eine weitere Kamera zu ergänzen ist.
3D-Lageerkennung per Kamera verkürzt Taktzeit
In Betrieb genommen, überzeugt das Lageerkennungssystem zunächst durch hohe Genauigkeit, Geschwindigkeit und Verfügbarkeit. Sobald eine Karosse ihre Stopp-Position in der Roboterzelle erreicht hat, nimmt jede der installierten Kameras des VMT 3D ein Bild auf, mit dem es die eingelernten Merkmale erfasst. Aus deren jeweiliger Position bestimmt die Software des Bildverarbeitungssystems auf wenige Zehntel Millimeter genau die tatsächliche Ist-Position der Karosse und berechnet den Bahnvektor, um den die programmierte Roboterbewegung korrigiert wird. Die ganze 3D-Positionsmessung benötigt gerade einmal 200 Millisekunden – ein Bruchteil der Taktzeit, der bei der mechanischen Zentrierung verloren geht.
Position und Prozess im Blick
Mögliche Fehlerszenarien bei der Lageerkennung, beispielsweise hervorgerufen durch deformierte, beschädigte, verschmutze oder verdeckte Antastgeometrien, berücksichtigt VMT 3D dadurch, dass mehr optische Merkmale als erforderlich gespeichert und redundant genutzt werden können. Auch mögliche Dejustagen der Kameras werden zuverlässig erkannt. Dies gewährleistet eine kontinuierlich hohe Verfügbarkeit der Positionsmessung und Roboternachführung. Während des Produktivbetriebes führt das Bildverarbeitungssystem zudem detaillierte Prozess- und Trendanalysen durch. Hierzu werden beispielsweise Rohbilder von Fahrzeugen untereinander oder auch mit den gerenderten Vorlagen verglichen, die Veränderung der Lage von Merkmalskoordinaten ausgewertet und die Erkennungsgüte statisch und dynamisch erfasst. Ebenso wird ein Qualitätswert errechnet, der eine Aussage darüber erlaubt, wie gut die Lage der erkannten Merkmale mit denen des hinterlegten Referenzfahrzeugs übereinstimmt. Diese Kenngröße dient als Frühwarn-Indikator beispielsweise für Verformungen an der Karosse oder für das Auftreten unerwünschter Produktionstoleranzen. Schließlich protokolliert VMT 3D alle Daten, die für die Dokumentation, Nachverfolgbarkeit und Statistik relevant sind.
AUTOR
Matthias Fiedler, Produktmanager bei VMT Vision Machine Technic Bildverarbeitungssysteme
Kontakt
VMT Vision Machine Technic Bildverarbeitungssyssteme GmbH
Mallaustraße 50-56
68219 Mannheim
Deutschland
+49 621 84250-0
+49 621 84250-290




