Ein 3D-Vision-Sensor für Qualitätssicherung und Intralogistik
Die 3D-Sensorplattform eines Mannheimer Herstellers bietet die Wahl zwischen zwei Varianten der 3D-Vision: Stereo Vision und Time-of-Flight (ToF). Die einheitliche Plattform senkt den Integrationsaufwand und erleichtert das Asset Management.
2D-Optik stößt an ihre Grenzen, wenn Tiefeninformation der z-Achse benötigt wird. So reicht sie zum Beispiel beim automatischen Befüllen von Getränkekisten oder Batteriepacks zwar für die Anwesenheitskontrolle, aber nicht mehr für das Überprüfen der dreidimensionalen Ausrichtung der Zielobjekte. Für eine höhergradige Automatisierung, in der beide Parameter in einem Durchgang verarbeitet werden, ist eine detaillierte Situationserfassung in drei Dimensionen gefragt.
Zusätzlichen Auftrieb für das 3D-Segment kommt außerdem vom zunehmenden Einsatz fahrerloser Transportfahrzeuge (FTF, oder automated guided vehicle, AGV) in der Lager- und Produktionslogistik. In diesem Anwendungsbereich sind Reichweite und hohe Dynamik gefragt, um die Fahrzeugsteuerung jederzeit mit validen Orientierungspunkten zu versorgen und auch plötzlich auftauchenden Hindernissen ausweichen zu können.
In der Qualitätssicherung blickt der 3D-Sensor dagegen meist aus einer fixierten Perspektive auf einen genau definierten Erfassungsbereich. Dort geht es eher um hohe Auflösung und feinste Differenzierung.

Qualitätssicherung und FTF-Steuerung mit derselben Sensorplattform
Herkömmliche Sensoren können meist nur eine dieser Aufgaben erledigen. In vielen Betrieben sind aber beide anzutreffen: automatisierte Qualitätskontrolle und FTF-Steuerung. Mit der Verwendung einer einheitlichen Sensorplattform lässt sich der Aufwand für die Geräteintegration und das Vorhalten von Automatisierungstechnologie reduzieren. Die Baureihe Smartrunner Explorer 3D von Pepperl+Fuchs ist für beide Einsatzarten geeignet. Sie bietet die Wahl zwischen zwei optoelektronischen Detektionsprinzipien und entsprechend ausgestatteten Geräten.
Die Stereo-Vision-Variante eignet sich für das hochdifferenzierte 3D-Erfassen im Nahbereich, während die Geräte mit Time-of-Flight-Technologie (TOF) ein Sichtfeld mit einer Tiefe von bis zu zehn Meter überwachen können. Beide Geräteversionen verfügen über das gleiche Aluminiumgehäuse, das für raue Bedingungen ausgelegt ist und zugleich als Kühlkörper fungiert. Eine Beeinträchtigung der Sensorfunktion durch die Betriebswärme ist damit ausgeschlossen.
Die Integration in die Anwendung wird durch die Auslegung der Geräteelektronik vereinfacht: Einmal vorgenommene Einstellungen lassen sich duplizieren, indem Vorgaben des ersten Sensors unmittelbar übernommen werden. Für eine schnelle Datenübertragung sorgt die Gigabit-Ethernet-Schnittstelle.
Die Visualisierung von 2D- und 3D-Daten erfordert auf der Benutzeroberfläche nur wenige Klicks. Beim Gerätetausch gilt das Plug & Play-Prinzip, eine Neukalibrierung ist nicht nötig. Ein Ausrichtlineal und passende Ausrichtungsbohrungen erleichtern die mechanische Integration.
Software-Paket inklusive ROS-Treiber
Es handelt sich bei beiden Gerätevarianten um kalibrierte Rohdatensensoren. Das Stereo-Vision-Gerät erledigt die Vorverarbeitung der Messdaten im integrierten FPGA. Danach lassen sich hochpräzise 3D-Punktwolkenbilder erstellen, die die gescannten Objekte hochaufgelöst darstellen.
Die standardisierte Datenstruktur und die kostenfreie Anwendersoftware (Visolution) ist bei beiden Gerätevarianten gleich. Visolution ermöglicht es, die Inbetriebnahme und Parametrierung anhand von Livedaten intuitiv und auf derselben Oberfläche durchzuführen. Ein ROS-Treiber (ROS=Robot Operating System) sorgt dafür, dass sich Sensor und Roboter direkt verständigen können und die räumlichen Koordinatensysteme auf beiden Seiten übereinstimmen.
Stereo-Vision mit 1 m Reichweite
Das Stereo-Vision-Gerät ist mit seiner Reichweite von einem Meter und einer Auflösung von 1,4 Megapixel für Inspektionsanwendungen mit hochpräziser Erfassung von Objekten in diesem Nahbereich ausgelegt. Der Sensor beherrscht das Prüfen und Zählen von definierten Objekten ebenso wie die Volumenerfassung von amorphen Massen. Sein Detektionsbereich hat im Abstand von 600 mm eine Größe von 400 x 350, bei einem Abstand von 900 mm ist er 550 x 500 mm groß.
Das Gerät verfügt über zwei Kameras für eine tiefenscharfe 3D-Erfassung. Zunächst überlagert der Sensor die aufgenommenen 2D-Bilder automatisch zu einem Disparitätenbild. Anhand der hochaufgelösten 2D-Bilder werden diese auf den gewünschten Erfassungsbereich ausgerichtet, was die Interpretation der Messergebnisse vereinfacht. Nach den Anpassungen wird das gewünschte 3D-Punktwolkenbild erstellt, das den Messbereich präzise und hochaufgelöst abbildet.
Time-of-Flight-Sensor unempfindlich gegenüber Fremdlicht
Die Time-of-Flight-Variante nutzt das Laufzeitverfahren und kommt daher mit einer Kamera aus. Sie verfügt über eine VGA-Auflösung (640 x 480 px) und eine Messrate von 30 Hz auf. Dieses Gerät deckt einen wesentlich größeren Messbereich ab und hat zugleich kurze Reaktionszeiten. Seine Durabeam-Beleuchtung emittiert Infrarotlicht mit einer Wellenlänge von 940 nm, also mit beträchtlichem Abstand zu Tageslicht und künstlicher Beleuchtung. Damit ist die Detektion unempfindlich gegenüber jeglicher Fremdlichteinwirkung in Innenräumen wie im Außeneinsatz. Die Detektion per Vier-Phasen-Messung steigert zusätzlich die Robustheit des Nutzsignals sowie der Messergebnisse.
Die Kamera nimmt ein zweidimensionales Z-Bild auf, wobei sie auch die Distanz zwischen Objekt und Sensor ermittelt. So entsteht ein Tiefenbild mit einer Höhenkarte, welche mit 2D-Informationen in x- und y-Richtung kombiniert wird. Zusammen ergibt dies ein detailreiches 3D-Punktwolkenbild, anhand dessen sich zum Beispiel die Steuerung eines fahrerlosen Transportfahrzeugs (AGV) im Raum orientieren kann.
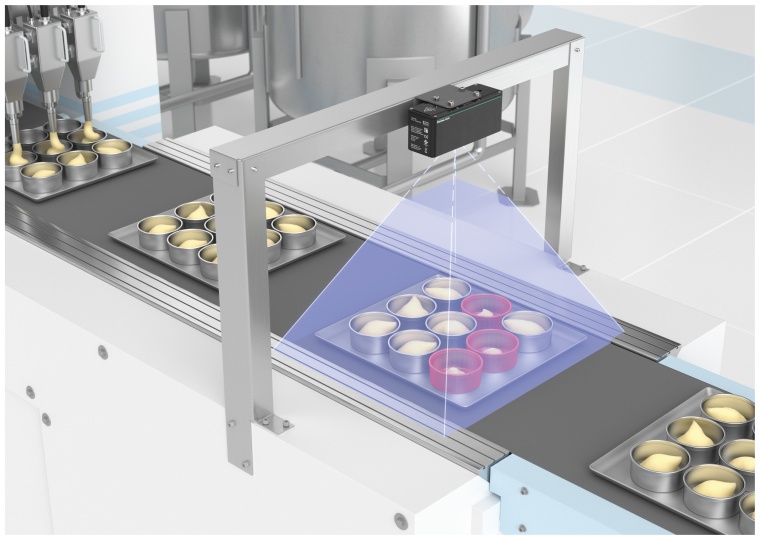
Stereo-Vision in der Großbäckerei
In Großbäckereien werden Teigfladen automatisch portioniert und zur Weiterverarbeitung befördert. Ein Sensor über dem Förderband vermisst sie dreidimensional und stellt sicher, dass die Fladen das vorgegebene Volumen haben.
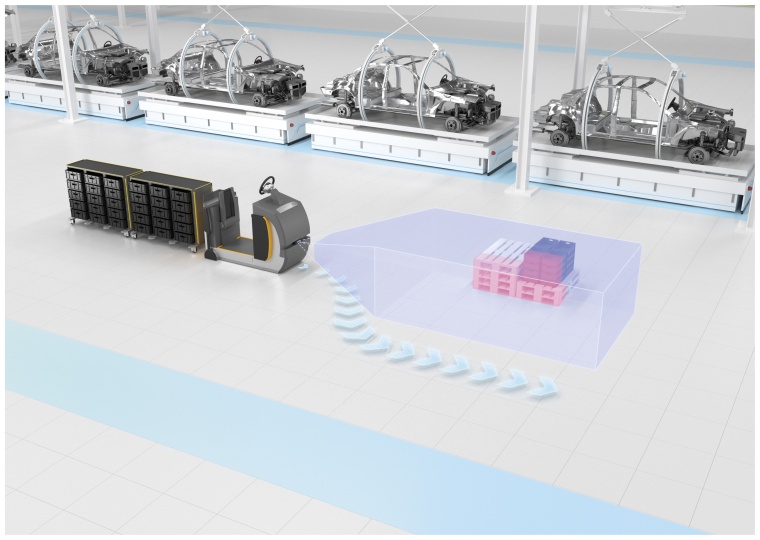
Ein Time-of-Flight-Sensor in der Palettierung
Ein Sensor am Roboterarm erkennt das auf dem Förderband ankommende Paket und erfasst seine Abmessungen. Ein weiterer Sensor über der Palette erkennt die noch verfügbaren Plätze. Die Steuerung kann die Pakete auf der Palette nach bestimmten Vorgaben zusammenstellen und unter optimaler Nutzung des Platzes stapeln lassen.
Ein in Fahrtrichtung gerichteter Sensor an einem AGV erkennt mobile Hindernisse ebenso wie festverbaute Strukturen. Mit seinen Daten lässt sich zum Beispiel eine Staplergabel in die Aussparungen im Palettenfuß oder ein Transportroboter unter ein anzuhebendes Objekt steuern.
Autor
Armin Hornberger, Leiter Produktmanagement, Industrial Vision Components
Anbieter
Pepperl+Fuchs SELilienthalstrasse 200
68307 Mannheim
Deutschland



Meist gelesen

Was Anwender und Hersteller über den Cyber Resilience Act wissen müssen
Sicherheitsexperte Thomas Hopfner vom Softwarehersteller MVTec erklärt, warum vernetzte Produktionsumgebungen ein bevorzugtes Ziel für Angriffe sind.

Präzise bis auf den Nanometer genau
Die Interferometrie ist in der Halbleiter-, Verpackungs- und Medizinindustrie von Bedeutung. Neue Weißlichtsysteme bieten Präzision im Nanometerbereich, hohe Messraten und sind ideal für den industriellen Einsatz.

Daten verstehen und für sich nutzen
Wenn Maschinen ausfallen, Gasflaschen leer sind oder Netze im Verborgenen Energie verlieren, wird es für Betreiber industrieller Anlagen teuer.

Der Turbo für die Intralogistik
Fahrerlose Transportsysteme können die Effizienz von Intralogistikprozessen deutlich steigern. Die Antriebe der Fahrzeuge müssen dabei kompakt, leistungsstark und präzise zugleich sein.

Supercaps: Die bessere Alternative zur Batterie?
Bei welchen Anwendungen liegen Supercaps vorn und was sind deren Vorteile?